Description du produit
KSMIT3 : un système de cap et de référence d'attitude autonome
KSMIT3 est un système de cap et de référence d'attitude de pointe qui se présente sous la forme d'un module autonome entièrement fonctionnel. Sa conception repose sur un nombre limité de composants matériels, ce qui facilite son intégration dans n'importe quel système.
Ce système innovant dispose d'un protocole de communication entièrement documenté et conforme aux normes de l'industrie, qui permet la personnalisation des messages de données en termes de fréquence, de format de sortie et de données. Le signal est entièrement traité sur la carte, qui n'utilise qu'une petite quantité de ressources sur l'hôte. Cette fonctionnalité rend KSMIT3 idéal pour une utilisation dans des environnements d'exploitation MCU simples.
KSMIT3 offre une grande précision dans des conditions dynamiques avec une précision de retournement et de tangage de 1 degré RMS, ainsi qu'une précision de déviation de 2 degrés RMS. Sa sortie est très stable, ce qui la rend parfaite pour une utilisation dans le contrôle et la stabilisation de tout objet ou navigation, comme les drones.
Caractéristiques
● AHRS pleines performances sur modules 12,1 x 12,1 mm
● Précision Flip/pITch (dynamique) 1,0 degrés
● Précision de cap 2,0 degrés
● Exigences extrêmement faibles pour le processeur principal
● Interface unifiée pour l'ensemble du cycle de vie du produit
● Faible consommation (45 mW à 3,0 V)
● Compatible avec le PCB PLCC28 (12,1 x 12,1 x 2,6 mm)
Paramètres techniques
| ARTICLE |
PARAMÈTRES (VALEURS TYPIQUES) |
| PRÉCISION DES ATTITUDES |
Précision de lacet (dynamique) |
2deg (rms) |
| Précision roulis/tangage (dynamique) |
1deg (rms) |
| GYROSCOPES |
Pleine échelle |
±2000°/s |
| Stabilité du biais en cours d'exécution |
10°/heure |
| Non-linéarité |
0,1% |
| Variation du facteur d'échelle |
0,05% |
| SENSIBILITÉ G |
0,1°/s/g |
| Densité du bruit |
0,01º/s/√Hz |
| Bande passante (-3dB) |
180Hz |
| ACCÉLÉROMÈTRES |
Pleine échelle |
±16g |
| Stabilité du biais en cours d'exécution |
0,1mg |
| Non-linéarité |
0,5% |
| Variation du facteur d'échelle |
0,05% |
| Densité du bruit |
200 μg/√Hz |
| Bande passante (-3dB) |
180 |
| MAGNÉTOMÈTRE |
Pleine échelle |
6gauss |
| Non-linéarité |
0,1% |
| Résolution |
120gauss |
| Bruit (rms) |
50gauss |
| INTERFACES |
Tension d'alimentation |
3,3 V CC |
| communication par port série |
Durée de vie |
| Fréquence de sortie |
Débit en bauds de 100 hz à 230 400 bauds |
Cadres de référence
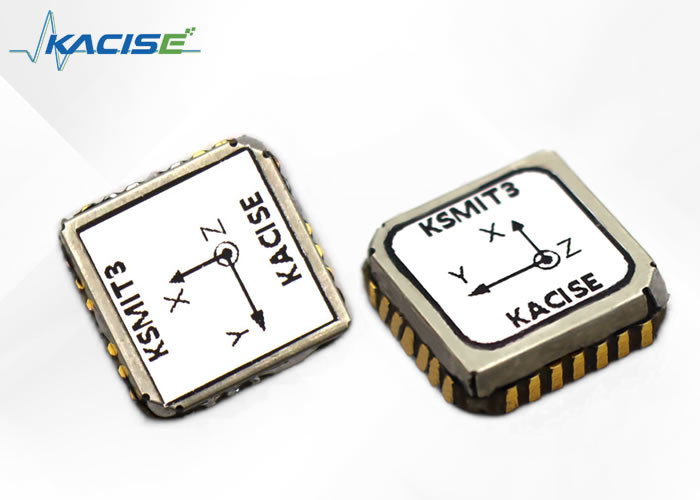
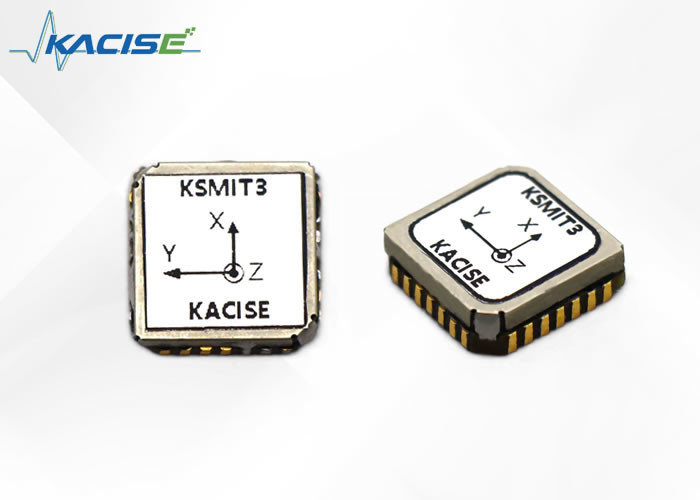
Le KSMIT3 utilise un système de coordonnées droitier et le cadre du capteur par défaut est défini comme indiqué dans la Figure 13. Pour un emplacement plus précis de l'origine du cadre du capteur, reportez-vous au manuel d'intégration matérielle. Certaines des sorties de données couramment utilisées avec leur système de coordonnées de référence de sortie sont répertoriées dans la figure 1.
 Figure 1 Système de coordonnées fixes du capteur par défaut pour le module KSMIT3
Figure 1 Système de coordonnées fixes du capteur par défaut pour le module KSMIT3
Protocole de communication utilisateur
Le débit en bauds est de 115 200 bps, 230 400 bps et 460 800 bps. Bit de données 8, bit d'arrêt 1, pas de bit de contrôle. Les octets de poids fort viennent en premier et les octets de poids faible en dernier. Fréquence de mise à jour des données f=100Hz. Le débit en bauds par défaut est de 230 400 bps.
| Nombre d'octets |
Nom |
Type d'octet |
Magnifi-cation |
Gamme |
ONUIL |
Description |
| 1~2 |
En-tête du cadre |
U,2 |
|
|
|
0XAA71 |
| 3 |
Numéro de format de trame |
Valeur fixe 3=0x03 |
| 4 |
Longueur de la trame de communication |
Valeur fixe 100=0x64 |
| 5~13 |
Gyro |
S,3*3 |
1e-4 |
±838,8608 |
°/s |
X/Y/Z Droite/Avant/Supérieur |
| 14~22 |
Acc |
S,3*3 |
1e-5 |
±83,88608 |
g |
X/Y/Z Droite/Avant/Supérieur |
| 23~28 |
Magnétique |
S,3*2 |
1e-2 |
±327,68 |
Utah |
X/Y/Z Droite/Avant/Supérieur |
| 29~31 |
Hbar |
S,1*3 |
1e-2 |
±83886.08 |
mbar |
Baromètre |
| 32 |
Drapeau |
U,1 |
|
|
|
BIT1-Magnétique Valide Marque 1- Valide
BIT2-Drapeau barométrique valide 1 - Valide
BIT3-GPS_existe
Informations GPS QUITTER ou non
0- Aucune information GPS
1- Informations GPS disponibles
Informations BIT4-GPS Indicateur valide 1 - Valide
BIT5-8 Zéro Remplissage
|
| 33~40 |
Mots réservés au système |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S,3*3 |
1e-4 |
±838,8608 |
MS |
GPS Est/Nord/Vitesse du ciel |
| 50~60 |
GPS_Lon/Lan |
S,2*4 |
1e-7 |
±214,7483648 |
° |
Longitude GPS/Latitude GPS |
| GPS_Hmsl |
S,1*3 |
1e-2 |
±83886.08 |
m |
Altitude GPS |
| 61~62 |
GPS_Headmot |
S,1*2 |
1e-2 8 |
±327,6 |
° |
Cap GPS |
| 63 |
Statut_GPS |
U,1 |
|
|
|
BIT1 ~ 4-Nombre de satellites de positionnement GPS (maximum 15)
BIT5 -Marque de positionnement GPS 1 valide
BIT6 ~ 8-Type de positionnement GPS
GPS_Fixtype
0x00=Aucune solution
0x01=A l'estime uniquement
0x02=2d Correction
0x03 = Correction 3D
0x04 = Gnss + réception morte combinée
0x05 = Correction temporelle uniquement
|
| 64~65 |
GPS_Pdop |
U,2 |
1e-2 |
|
|
|
| 66~71 |
Ins_Att |
S,2*2 |
1e-2 |
±327,68 |
° |
Inclinaison ±90° Roulement ±180° |
| S,1*2 |
655.36 |
° |
Lacet ±180° |
| 72~80 |
Vn |
S,3*3 |
1e-4 |
±838,8608 |
MS |
Vel_E/N/U |
| 81~89 |
Pos |
S,2*4 |
1e-7 |
±214,7483648 |
° |
LongITUde/ Latitude |
| S,1*3 |
1e-2 |
±83886.08 |
m |
Altitude |
| 92 |
Modes et scénarios |
U,1 |
|
|
|
BIT1 ~ 4-Mode de fonctionnement
Aligner=1 ; Ins=2 ; Ahrs=3;Vg=4
BIT5 ~ 8 - Scénario de travail
1=À bord ;2=Intérieur ; 3=Embarqué 4=Aile fixe;5=Rotor
|
| 93~96 |
Réserve |
|
|
|
|
Remplissage zéro |
| 97~98 |
Température |
S,2 |
1e-2 |
±327,68 |
℃ |
|
| 99 |
Compter |
U,1 |
|
|
|
|
| 100 |
Vérifier le code |
|
|
|
|
Somme de tous les caractères avant le BIT de vérification |
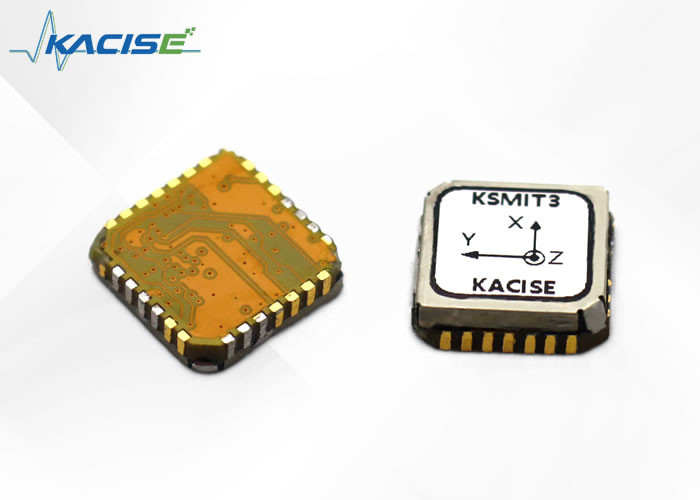
Configuration des broches
Figure 2 : Configuration des broches du module KSMIT3 (vue de dessus)
| Numéro |
Nom |
Taper |
Description |
| 7 |
VDDIO |
Pouvoir |
Tension d'alimentation numérique |
| 8 |
GND |
| 23 |
UART_RX |
Interface UART |
Entrée des données du récepteur |
| 24 |
UART_TX |
Interface UART |
Sortie de données du transmetteur |
| 25 |
GND |
| 18 |
AUX_RXA |
Interface GNSS auxiliaire |
Entrée des données du récepteur depuis le module GNSS |
| 19 |
UX_TX |
Interface GNSS auxiliaire |
Sortie de données du transmetteur vers le module GNSS |
| 20 |
SYNC_PPS |
Interface GNSS auxiliaire |
Entrée d'impulsions par seconde du module GNSS |
Paramètres des paramètres
Le produit passe par défaut à l'état « sortie continue » lors de la mise sous tension, et pour définir les paramètres, la commande « arrêter la sortie » doit être envoyée en premier. Attention : Après avoir utilisé la commande suivante, l'utilisateur doit allumer et redémarrer pour passer automatiquement à l'état de transmission continue.
1 Arrêter la sortie
L'arrêt de la sortie consiste à basculer l'état par défaut de « sortie continue » à la mise sous tension vers l'état « réglage des paramètres ».
Envoyé à : * Espace PA Espace GS01 STOP retour chariot
Répondre:
* Espace PA Espace GS01 Espace STOP 0 retour chariot Échec
*PA espace GS01 espace STOP espace 1 retour chariot réussi
2 Mettre en place des scénarios de travail
Le produit doit changer les paramètres de filtre en fonction de différents scénarios d'application. Les scénarios de travail incluent le montage sur voiture, l'intérieur (table pivotante), le bord du navire, l'aile fixe et le rotor, avec le scénario embarqué par défaut pour la mise sous tension.
Le changement de scène consiste à changer la « scène de voiture » par défaut lors de la mise sous tension sur la scène réelle.
Envoyer : * Espace PA Espace GS01 Espace SCENES 1 retour chariot
Répondre:
* Espace PA Espace GS01 Espace SCENES espace 1 espace 0 retour chariot Échec
*PA espace GS01 espace SCENES espace 1 espace 1 retour chariot Réussi
Remarque : Les caractères soulignés incluent 1 monté sur voiture, 2 à l'intérieur, 3 monté sur un navire, 4 à voilure fixe et 5 à rotor en option.
3 Définir le débit en bauds
Le débit en bauds par défaut pour la mise sous tension est de 230 400 bps, qui peut être commuté en envoyant des commandes.
Envoyer : * Espace PA Espace GS01 Espace BAUD 1 retour chariot
Répondre:
* Espace PA Espace GS01 Espace BAUD 1 Espace 0 retour chariot Échec
*PA espace GS01 espace BAUD espace 1 espace 1 retour chariot Réussi
Remarque : Le contenu des caractères soulignés est 1-115 200 bps, 2-230 400 bps et 3-460 800 bps, qui sont facultatifs.
4 Restaurer les paramètres d'usine
La restauration des paramètres d'usine implique de définir la scène de travail, le format d'image, la vitesse de transmission, la déclinaison magnétique et l'étalonnage du champ magnétique aux valeurs par défaut.
Envoyer : * Espace PA Espace GS01 RESET retour chariot
Répondre:
* Espace PA Espace GS01 Espace RESET 0 retour chariot Échec
*Espace PA Espace GS01 Espace RESET Espace 1 retour chariot Réussi
5 Régler l'angle de déclinaison magnétique
La déclinaison magnétique par défaut est 0, avec un nord-est magnétique positif et un ouest magnétique négatif.
Envoyer : * Espace PA Espace GS01 Espace MDEC+/- XX.XX retour chariot
Répondre:
* Espace PA Espace GS01 Espace MDEC 0 retour chariot Échec
*Espace PA Espace GS01 Espace MDEC 1 retour chariot Réussi
Remarque : Si l'angle de déclinaison magnétique est de -2,5 degrés, la chaîne de soulignement est de -02,50 ; Si l'angle de déclinaison magnétique est de +1,5 degrés, la chaîne de soulignement est de +01,50.
6 Étalonnage du champ magnétique
Lors du fonctionnement des capteurs magnétiques, il est inévitable qu'il soit affecté par l'interférence des champs électromagnétiques environnants, ce qui peut entraîner divers degrés de déviation et de déformation de l'intensité du champ magnétique de l'axe XYZ mesurée par le capteur magnétique. L'étalonnage du champ magnétique consiste à compenser les interférences magnétiques douces et dures grâce à l'apprentissage par algorithme de l'environnement du champ magnétique environnant. Par conséquent, nous recommandons fortement que l'étalonnage du champ magnétique soit mis en œuvre après chaque installation et après des modifications dans l'environnement du champ magnétique.
Lors de l'étalonnage du champ magnétique, les substances interférentes environnantes doivent rester inchangées (c'est-à-dire tourner avec le produit) pendant le processus de rotation du produit et la position relative du produit. L'étalonnage nécessite que l'opérateur ne dispose pas de téléphone portable, de carte magnétique, de clé ou d'appareil métallique ou électrique pouvant affecter le champ électromagnétique sur son corps.
Attention : Ce n'est que dans la plage d'interférences limitée que l'opération d'étalonnage du champ magnétique peut avoir un effet de compensation. La portée du capteur magnétique se situe approximativement entre plus et moins 1 Gauss, soit environ deux fois le champ géomagnétique de l'hémisphère nord. Si la valeur d'interférence du champ magnétique dépasse plus ou moins 0,5 Gauss, le magnétomètre peut atteindre un état de saturation, ce qui entrave l'effet de compensation. Lorsque l'étalonnage échoue, IT indique que le problème est survenu.
Calibrage 2D
Remarque : Lorsque le produit ne peut pas pivoter en 3D, l'étalonnage 2D peut être utilisé. IL est recommandé que l'angle d'inclinaison réel du produit soit inférieur à 5 degrés. L'étalonnage 2D peut être effectué via l'interface ou le port série en émettant des commandes.
1. Démarrer l'étalonnage : avant l'étalonnage utilisateur, envoyez
Envoyer : * Espace PA Espace GS01 Espace MCAL START retour chariot
Répondre:
* Espace PA Espace GS01 Espace MCAL Espace START 0 retour chariot Échec
*Espace PA Espace GS01 Espace MCAL Espace START Espace 1 retour chariot Réussi
2 Arrêtez l'étalonnage : démarrez la rotation horizontale pendant plus de 2 tours et envoyez-la une fois terminé.
Envoyer : * Espace PA Espace GS01 Espace MCAL FIN retour chariot
Répondre:
* Espace PA Espace GS01 Espace MCAL 0 retour chariot Échec
*PA espace GS01 espace MCAL espace 1 espace X : x.xx espace Y : y.yy retour chariot réussi
Remarque : Le retour de résultats d'étalonnage de 0,90-1 indique de bons résultats d'étalonnage, tandis que >1,1 ou <0,9 indique de mauvais résultats d'étalonnage.
3. Enregistrez les résultats d'étalonnage : après l'étalonnage utilisateur, décidez si vous souhaitez enregistrer en fonction des résultats d'étalonnage.
Envoyer : * Espace PA Espace GS01 Espace MCAL SAVE retour chariot
Répondre:
* Espace PA Espace GS01 Espace MCAL Espace SAVE 0 retour chariot Échec
*Espace PA Espace GS01 Espace MCAL Espace SAVE 1 retour chariot Réussi
4. Effacer les résultats d'étalonnage : après l'étalonnage, l'utilisateur décide d'effacer ou non en fonction des résultats d'étalonnage.
Envoyer : * Espace PA Espace GS01 Espace MCAL Retour chariot CLEAR
Répondre:
* Espace PA Espace GS01 Espace MCAL Espace CLEAR 0 retour chariot Échec
*Espace PA Espace GS01 Espace MCAL Espace CLEAR 1 retour chariot Réussi
UNapplications
Véhicules aériens miniatures
• Drones de livraison
• Drones vidéo
• Drones agricoles
Machinerie
• Satcom en mouvement (SotM)
• Engins de chantier
• Surveillance des navires
Robotique
• Agriculture autonome
• Automatisation de l'entrepôt
• Bras robotisés
Autres applications
• Appareils portables
• Navigation piétonne
• VR/AR et HMD
•Aide à la navigation
Assistance et services :
Bienvenue dans notre assistance technique et nos services pour le capteur gyroscope. Notre équipe dédiée est là pour vous aider pour tout problème technique ou toute question que vous pourriez avoir concernant l'utilisation, l'installation ou la maintenance de votre capteur gyroscope. Nous nous engageons à vous fournir le meilleur support possible pour garantir le fonctionnement optimal de votre produit.
Notre assistance comprend une documentation produit détaillée, une foire aux questions (FAQ) et des guides de dépannage conçus pour vous aider à résoudre rapidement les problèmes courants. Pour des problèmes plus complexes ou spécifiques, notre équipe de support technique est prête à vous fournir une assistance personnalisée.
Si vous avez besoin d'une assistance supplémentaire, veuillez vous référer à la section « Contactez-nous » de notre site Web (coordonnées exclues selon la demande) où vous pouvez trouver des ressources supplémentaires et des canaux d'assistance pour entrer en contact avec notre équipe d'assistance technique professionnelle.
Merci d'avoir choisi notre capteur gyroscope électronique. Au plaisir de vous servir et d'assurer le succès de vos projets
Emballage et expédition :
Le capteur gyroscope électronique est soigneusement emballé dans un sac antistatique pour garantir une protection contre les décharges électrostatiques (ESD). Le capteur est ensuite solidement enfermé dans un moule en mousse haute densité sur mesure, qui offre une absorption supérieure des chocs pendant le transport. Cette mousse est placée dans une boîte en carton durable de marque qui protège le capteur des facteurs environnementaux et des dommages potentiels pendant le transport.
L'extérieur de la boîte comporte un étiquetage clair avec le nom du produit, des instructions de manipulation et un code-barres pour un suivi facile. Tous nos colis sont scellés avec du ruban inviolable, offrant une couche de sécurité supplémentaire.
Pour l'expédition, le capteur gyroscope électronique est expédié via un service de messagerie de confiance pour garantir une livraison rapide et sûre. Nous incluons une assurance pour la valeur totale du produit, offrant une tranquillité d'esprit et une protection pour votre investissement. Les informations de suivi sont fournies dès l'expédition du colis, permettant un suivi en temps réel de l'envoi jusqu'à son arrivée à destination.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski